- 0-Introduction
- 1-Chatbot Variables
- 2-Password IF Statements
- 3-Create Main Menu functions
- 4-Complete Quiz 3 Questions
- 5-Adding Score variable global
- 6-Debug this code
- 7-Introducing While loops Boolean flags
- 8-Introducing Validation password creation
- 9a-For Loop Guess the number
- 9b-For Loop Password Challenge
- 9c-For Loop Times table challenge
- FINAL CHALLENGE
- Skills Consolidation Task 1
- Test 1
- 0-Introduction
- 1-Introducing Lists
- 2-Personality Predictor Lists app
- 3-Players assigned weapons lists
- 3a-Nested List Matrix Snakes and Ladders game
- 3b Nested List Super Extension Complete game
- 4-String Manipulation Username Creator
- 5-StringManipulation Email Creator based on Validated username
- 6-Strip characters from password app
- 7-Create registration feature using lists
- 8-Introducing Dictionaries registration with dicts
- 8a-Course teacher finder program with dicts
- 9a-Football Club app Create and Learn
- 9b-Online Shopping Basket Checkout Program Create and Learn
- Test 1
- 0-Introduction
- 1-Introducing File Handling
- 2-READ from fake facebook file
- 3-SEARCH for username return no of friends
- 4-SEARCH by ID return full record listing
- 5-ADD WRITE a new user to file
- 6-SORT file by USER ID and Last Name
- 7-Bingo game store scores
- 8-Modulo Magic Program
- 9-Create Maths Quiz Program Tutorial
- 9a-How-to-DELETE user record row from file
- 9b-How to EDIT a field in a file
- Test 1
- 00 Intro
- 01 Main Menu Start Screen
- 02 Registration Feature Part1
- 03 Secure Password Creator
- 04 Login Functionality
- 05 MainFilms Menu Members
- 06 Allow Users to View films
- 07 Store Viewed Films by user
- 08 Allow users to like films
- 09 Search by Title
- 10 Search by Rating
- 11 Recommendations based on viewing FinalSolutions
- 00 Overview Start Here
- 01 Connect Create table
- 02 Add records to table
- 03 Fetch Display records
- 04 Update database records
- 05 Delete records
- 06 Search by condition where clause
- 07 Search for key phrase word
- 08 Sorting in SQLite
- 09 Search return selected fields
- 10 Count no rows
- 11 Find Max Value in column
- 12 Calculate Average
- 13 Calculate SUM total
- 14 Login username password sqlite
- 00-Introduction to OOP and Classes
- 01-Setup Game Canvas
- 02-Create a Ball Class
- 03-Setup main animation loop
- 04-Make the ball move up
- 05-Create bouncing ball movement
- 06-Change Starting Direction
- 07-Right left wall collision detection
- 08-Add Pong bat paddle class
- 09-Bat movement
- 10 Bat Ball collision detection
- 11 End Game Feature if ball hits bottom
- 12 Display text game over
~ Searching Algorithms - A* Algorithm
A* Algorithm
Many computer scientists would agree that A* is the most popular choice for pathfinding, because it’s fairly flexible and can be used in a wide range of contexts. A* is like Dijkstra’s algorithm in that it can be used to find a shortest path. A* is like Greedy Best-First-Search in that it can use a heuristic to guide itself. So what is the relevance of these sort of searching algorithms today? Well, for one they are essential to game artificial intelligence. The notion of pathfinding, or finding a path from ‘A’ to ‘B’, past any obstacles that get in the way, is going to be key in many games. One way to do this is to use the A* algorithm. A* is commonly used for the common pathfinding problem in applications such as games, but was originally designed as a general graph traversal algorithm. It finds applications to diverse problems, including the problem of parsing using stochastic grammars in NLP. Other cases include an Informational search with online learning
Suggested Video
Challenge
#1 Create your own code to illustrate the functionality of this algorithm
#2 Comment each line of the python solution below to show your understanding of the algorithm
Solution - A* Graph Search Algorithm
def A*-GRAPH-SEARCH (start):
Let pq be an empty min priority queue
Let closed be an empty set
g(start) = 0
f(start) = h(start)
path(start) = []
pq.push(start, f(start))
while not pq.empty():
top = pq.pop()
if isGoal(top):
return f(top), path(top)
closed.add(top)
foreach next in succ(top):
if next not in closed:
g(next) = g(top) + cost(top, next)
f(next) = g(next) + h(next)
path(next) = path(top).append(next)
pq.push(next, f(next))
Solution - A* Tree Search Algorithm
def A*-TREE-SEARCH (start):
Let pq be an empty min priority queue
g(start) = 0
f(start) = h(start)
path(start) = []
pq.push(start, f(start))
while not pq.empty():
top = pq.pop()
if isGoal(top):
return f(top), path(top)
foreach next in succ(top):
g(next) = g(top) + cost(top, next)
f(next) = g(next) + h(next)
path(next) = path(top).append(next)
pq.push(next, f(next))
The above two examples are taken from: https:// kartikkukreja. wordpress. com
Additional A* Algorithm Implementation example from:
https://gist.github.com/jamiees2/5531924
Wiki animations and illustrations
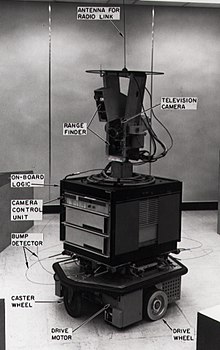
#1: A* was invented by researchers working on Shakey the Robot's path planning.
#2: Illustration of A* search for finding path from a start node to a goal node in a robot motion planning problem. The empty circles represent the nodes in the open set, i.e., those that remain to be explored, and the filled ones are in the closed set. Color on each closed node indicates the distance from the start: the greener, the farther. One can first see the A* moving in a straight line in the direction of the goal, then when hitting the obstacle, it explores alternative routes through the nodes from the open set.

#3: The A* algorithm also has real-world applications. In this example, edges are railroads and h(x) is the great-circle distance (the shortest possible distance on a sphere) to the target. The algorithm is searching for a path between Washington, D.C. and Los Angeles.

#4: An example of an A* algorithm in action where nodes are cities connected with roads and h(x) is the straight-line distance to target point:

Additional Information (Wikipedia excerpt)
A* was invented by researchers working on Shakey the Robot's path planning.
In 1968, AI researcher Nils Nilsson was trying to improve the path planning done by Shakey the Robot, a prototype robot that could navigate through a room containing obstacles. This path-finding algorithm, which Nilsson called A1, was a faster version of the then best known method, Dijkstra's algorithm, for finding shortest paths in graphs. Bertram Raphael suggested some significant improvements upon this algorithm, calling the revised version A2. Then Peter E. Hart introduced an argument that established A2, with only minor changes, to be the best possible algorithm for finding shortest paths. Hart, Nilsson and Raphael then jointly developed a proof that the revised A2 algorithm was optimal for finding shortest paths under certain well-defined conditions.
A* is an informed search algorithm, or a best-first search, meaning that it solves problems by searching among all possible paths to the solution (goal) for the one that incurs the smallest cost (least distance travelled, shortest time, etc.), and among these paths it first considers the ones that appear to lead most quickly to the solution. It is formulated in terms of weighted graphs: starting from a specific node of a graph, it constructs a tree of paths starting from that node, expanding paths one step at a time, until one of its paths ends at the predetermined goal node.
Example of use in Game design
Website with files: https://github.com/wordswords/astarpython
Implementation of the A* pathfinding algorithm, with 'Roguelike' text visulisations of the pathfinding in plain ASCII.
Passable squares are denoted by a '0' character, and impassable squares by a '7'. For the sake of simplicity, currently the start square is always the top left square (0,0) and the goal square is always the bottom right square.
Example
This is the board before running:
00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000777000000000000000 00000000000000000000000000000000777000000000000000 00000000000000000000000000000000777000000000000000 00000000000000000000000000000000777000000000000000 00000000000000000000000000000000777000000000000000 00000000000000000000000000000000777000000000000000 00000000000000000000000000000000777000000000000000 00000000000000000000000000000000777000000000000000 00000000000000000000000000000000777000000000000000 00000000000000000000000000000000777000000000000000 00000000000000000000000000000007777000000000000000 00000000000000077777777777777777700000000000000000 00000000077777777777777777777777700000000000000000 00000077777777777700000000000000000000000000000000 77777777777000000000000000000000000000000000000000 77777777000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 77777777777777777707777777777777777777777777777777 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 70777777777777777777777777777777777777777777777777 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 77777777777777777777700000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000000000000000000000000000000000 00000000000000000000777777777777777777777707777777 00000000000000000000700000000000000000000000000000 00000000000000000000700000000000000000000000000000 00000000000000000000700000000000000000000000000000 00000000000000000000700000000000000000000000000000 00000000000000000000700000000000000000000000000000 00000000000000000000700000000000000000000000000000 00000000000000000000700000000000000000000000000000 00000000000000000000700000000000000000000000000000
This is the path found (the '*'s):
**000000000000000000000000000000000000000000000000 0***********************************00000000000000 00000000000000000000000000000000777*00000000000000 00000000000000000000000000000000777*00000000000000 00000000000000000000000000000000777*00000000000000 00000000000000000000000000000000777*00000000000000 00000000000000000000000000000000777*00000000000000 00000000000000000000000000000000777*00000000000000 00000000000000000000000000000000777*00000000000000 00000000000000000000000000000000777*00000000000000 00000000000000000000000000000000777*00000000000000 00000000000000000000000000000000777*00000000000000 00000000000000000000000000000007777*00000000000000 00000000000000077777777777777777700*00000000000000 00000000077777777777777777777777700*00000000000000 00000077777777777700000000000000000*00000000000000 77777777777000000000000000000000000*00000000000000 77777777000000000000000000000000000*00000000000000 00000000000000000000000000000000000*00000000000000 00000000000000000000000000000000000*00000000000000 00000000000000000000000000000000000*00000000000000 00000000000000000000000000000000000*00000000000000 00000000000000000000000000000000000*00000000000000 000000000000000000******************00000000000000 777777777777777777*7777777777777777777777777777777 000000000000000000*0000000000000000000000000000000 0******************0000000000000000000000000000000 7*777777777777777777777777777777777777777777777777 0*****************************00000000000000000000 00000000000000000000000000000**0000000000000000000 000000000000000000000000000000**000000000000000000 0000000000000000000000000000000*000000000000000000 0000000000000000000000000000000***0000000000000000 000000000000000000000000000000000*0000000000000000 000000000000000000000000000000000**000000000000000 0000000000000000000000000000000000**00000000000000 77777777777777777777700000000000000***000000000000 0000000000000000000000000000000000000**00000000000 00000000000000000000000000000000000000*00000000000 00000000000000000000000000000000000000**0000000000 000000000000000000000000000000000000000****0000000 000000000000000000007777777777777777777777*7777777 000000000000000000007000000000000000000000**000000 0000000000000000000070000000000000000000000*000000 0000000000000000000070000000000000000000000***0000 000000000000000000007000000000000000000000000**000 0000000000000000000070000000000000000000000000*000 0000000000000000000070000000000000000000000000***0 000000000000000000007000000000000000000000000000*0 000000000000000000007000000000000000000000000000**
Setup
You will need a board to find a path across. Some sample boards are in /boards. Passable squares are denoted by a '0' character, and impassable squares by a '7'. For the sake of simplicity, currently the start square is always the top left square (0,0) and the goal square is always the bottom right square.
Running
python search.py <board txt path> <board width> <board height>
ie:
python search.py boards/board50obs2.txt 50 50
Pseudocode
This was taken from http://en.wikipedia.org/wiki/A*_search_algorithm
More Info
http://www.davidcraddock.net/2014/06/12/a-algorithm-implementation-in-python/